The BAT Cane : A Low-Cost Smart Cane for the Blind
CONCLUSION
Discussion
We tested 10 blindfolded students to determine how effective our travel cane was. The users performed two different tests. The first was to walk 30 feet and to ascertain how far off path they ended up: this was to determine how well the straight-path detection was functioning. The second was to avoid 4 obstacles placed in their path: this tested the ultrasonic sensor and how reliable the feedback was. Once the tests were complete, users were asked whether they would like more or less vibration. We also documented how often the code crashed and had to be reset. There was obviously a fair amount of drift (an average of 4 feet in a 30 feet path); if we had more time, we would refine the code so that it was less likely to crash and was more accurate. Still, most of the obstacles were avoided, and with more time, it could be a very effective tool to help the blind navigate better.
Test Results


Number of Deviations Within 30 Feet
70% of deviations were less than 4ft from the goal. Higher precision is necessary; more testing would be helpful.

Number of Obstacles Users Did Not Avoid Within 30 Feet
All users were able to avoid at least one obstacle. This is not sufficient, but with minor changes could be very useful.
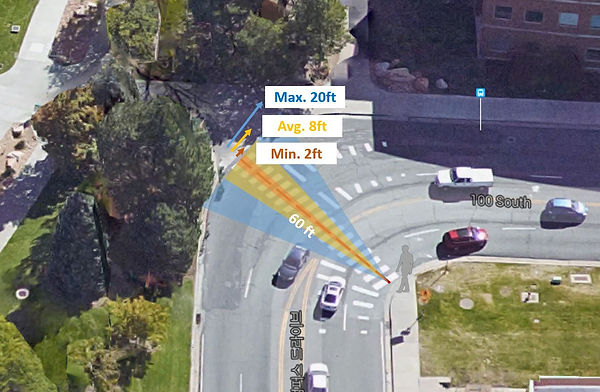
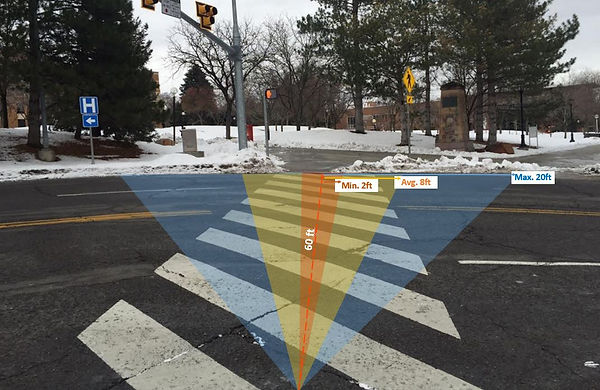
Simulation
We did not test on a real street, but the following images show simulated results. There is a 60 ft crosswalk in front of the Mechanical Engineering Building (MEK) at the University of Utah. If a user with a BAT cane would like to walk straight on a crosswalk, our results show a minimum 2ft, average 8ft, and maximum 20ft deviation. As a result, we defined that 30% of the result (14~20ft, blue color) is inadequate performance as the user would deviate too far from the crosswalk. However, we have an optimistic view of our cane for two reasons: first, 70% of users (2~8ft, yellow and orange color) would have sufficient results to help guide them across the crosswalk. Second, we tested only a few students. With robust testing and minor changes, the cane would help the blind navigate much better than a traditional cane alone. Moreover, the cane could easilt be upgraded by a greater precsision in both software and hardware (better signal processing and high-resolution micro sensors). Also, the sensor's position on the body could be changed if testing showed improved results elsewhere (on the knee, for example).
Simulated Image
GO UTES !
Conclusion
This project had some flaws; however, with minor adjustments, it could be an extremely useful device to help those who are blind. We have shown that a smart cane can be developed at a lower cost while still being effective.
At this time, we would like to acknowledge Dr. Fehlberg from the Department of Mechanical Engineering for the University of Utah for useful contributions to this project. We would also like to acknowledge the grant funding we received for this project.
(NSF GARDE #1159885).
GO UTES !